摘要
事件相机作为新型传感器具有低延迟高动态范围的特点,但是同时事件相机也很敏感容易收到噪声的影响。基于此我们设计了一种具有多尺度自适应感知的事件相机去噪方法,在具有较好去噪效果的同时保证较低的计算量。
本文的核心创新点
1.引入了多尺度的思想,在去噪时使用了多个尺度的信息来保证对噪声点判断的准确性。
2.自适应地使用多尺度的信息
3.首次将SNN引入事件相机的去噪(TODO)
背景与介绍
如图所示,事件相机在捕获数据时会
自适应多尺度设计
考虑到或许在边界等区域小尺度会比大尺度效果更好,参考集成学习的思路,我们设计了一种自适应多尺度的集成方法。
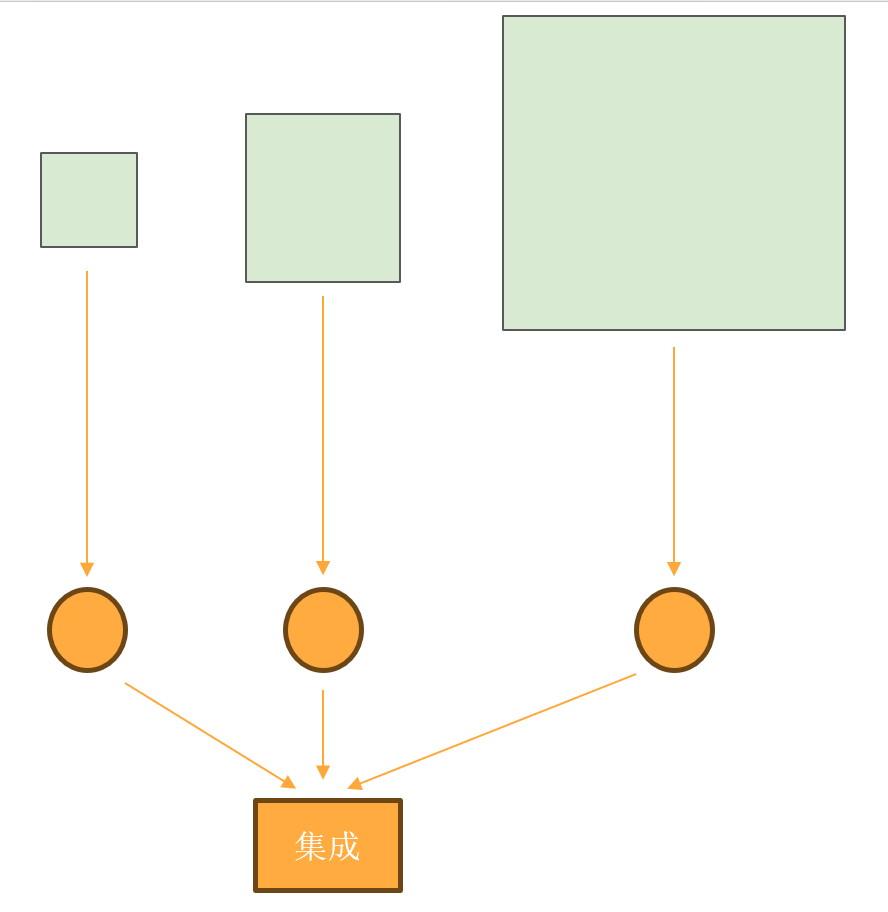
最简单的集成就是对不同尺度分别训练一个模型,对输出结果进行平均,得到一个”平均“的结果。但是这么做很明显不是“最好”的。
考虑一种情况,如果大尺度的输入内容多数都是“0”呢?也就是如果大尺度的数据多数为空的情况下,这种情况下我认为用大尺度的效果不如用小尺度。
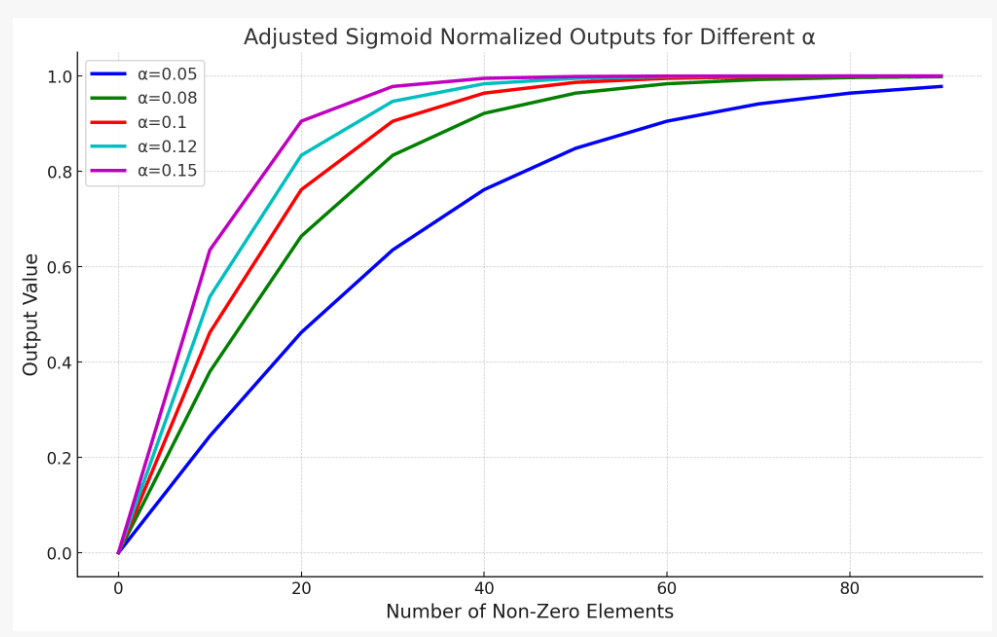
因此我考虑设计了这样一个函数:$$f(v)=(sigmoid(\alpha⋅∥v∥_0)−0.5)×2$$
其中v是输入的向量,
这个函数在做什么呢?首先